 哈希表
哈希表
# 引入
哈希表(hash table),又称散列表,它通过建立键key与值value之间的映射,实现高效的元素查询。
向该结构当中插入和搜索元素的过程如下:
- 插入元素: 根据待插入元素的关键码,用此函数计算出该元素的存储位置,并将元素存放到此位置。
- 搜索元素: 对元素的关键码进行同样的计算,把求得的函数值当作元素的存储位置,在结构中按此位置取元素进行比较,若关键码相等,则搜索成功。
此方式对应的就是哈希方法,使用哈希函数来建立映射。
# 哈希函数
# 直接定址法
取关键字的某个线性函数为哈希地址:Hash(Key) = A ∗ Key + B
优点:每个值都有一个唯一位置,效率很高,每个都是一次就能找到。
- 缺点:使用场景比较局限,通常要求数据是整数,范围比较集中。
- 使用场景:适用于整数,且数据范围比较集中的情况。
# 除留余数法
设散列表中允许的地址数为m,取等于m的质数p作为除数,按照哈希函数:Hash(Key) = Key % p (p <= m)
- 优点:使用场景广泛,不受限制。
- 缺点:存在哈希冲突,需要解决哈希冲突,哈希冲突越多,效率下降越厉害。
# 哈希冲突
从本质上看,哈希函数的作用是将所有 key 构成的输入空间映射到数组所有索引构成的输出空间,而输入空间往往远大于输出空间。
因此,理论上一定存在“多个输入对应相同输出”的情况。
# 开放定址法
当发生哈希冲突时,如果哈希表未被装满,说明在哈希表种必然还有空位置,那么可以把产生冲突的元素存放到冲突位置的“下一个”空位置中去。
# 线性探测
下一个位置的计算公式:
Hi=( H0 + i ) % m ( i = 1,2,3 ...)
# 平方探索
下一个位置的计算公式:
Hi=( H0 + i2 ) % m ( i = 1,2,3 ...)
开放定址法就是我的位置被占用,我就去占用别人的位置,并且快接近满的时候就增容。
负载因子 = 表中的数据个数 / 表的大小
一般情况,闭散列的哈希表中,负载因子到0.7就可以开始增容,负载因子越小,冲突概率越低,效率越高。相反,负载因子越大,冲突概率越高,效率越低。 但是负载因子也不敢控制得太小,会导致大量的空间浪费。其实控制负载因子是一种以空间换时间的思路。
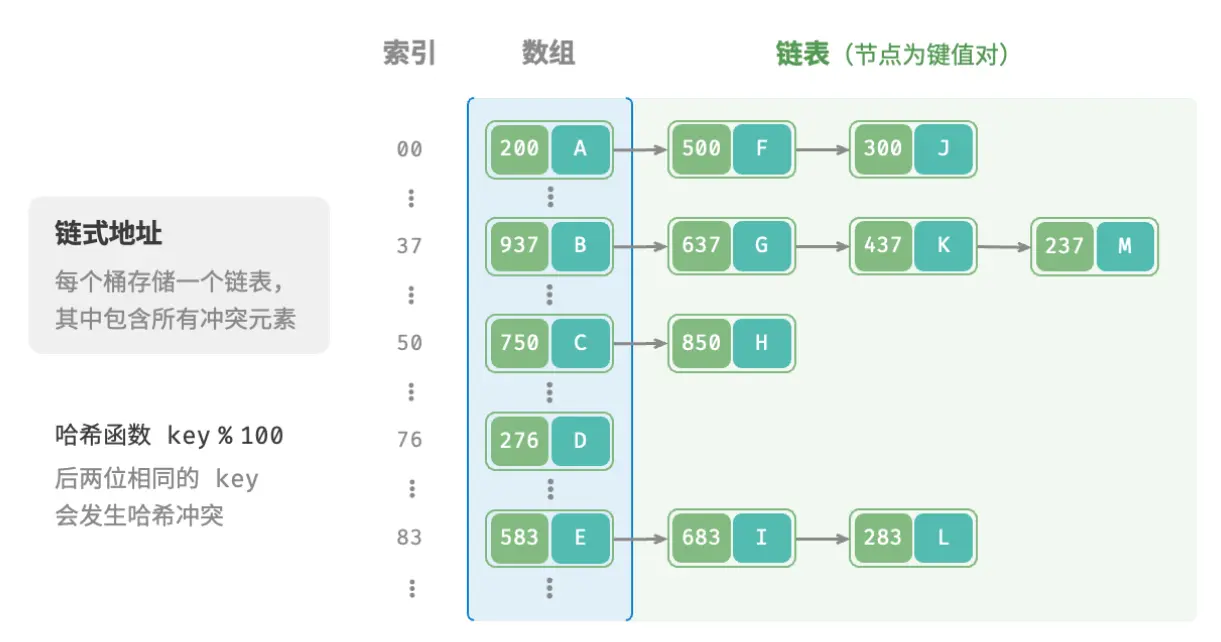
# 链地址法
在原始哈希表中,每个桶仅能存储一个键值对。链式地址(separate chaining)将单个元素转换为链表,将键值对作为链表节点,将所有发生冲突的键值对都存储在同一链表中。
值得注意的是,所有元素全部产生冲突,最终都放到了同一个哈希桶中,查询效率很差O(n)。此时可以将链表转换为AVL树或红黑树,从而将查询操作的时间复杂度优化至O(logn)。